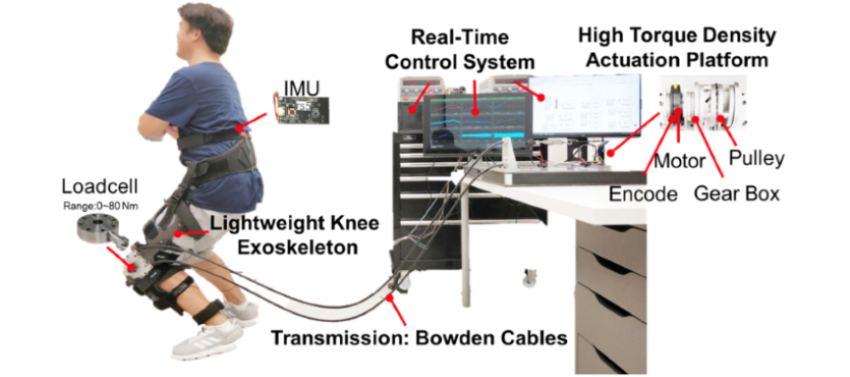
High Performance Tethered Knee Exoskeleton
 Datasheet
Datasheet
Benefits/Advantages
| Property | Value |
|---|---|
| Lightweight | Unilateral exoskeleton weight only 1 kg |
| High Torque Density Motor | 7.0 Nm/kg, 4 times for other available devices |
| Effective Assistance | Nominal torque is 48 or 64 Nm, can provide more than 50% torque assist for walking and reduce 75% muscle activities for squatting |
| High Bandwidth | 65 Hz, walking and running are super stable |
| High Backdrivability | 0.9 Nm, almost no mechanical resistance is felt |
| High Stiffness | 15 ms |
| Interface Type | >350 Nm/rad, more than average stiffness value of normal walking 260 Nm/rad |
| High Accuracy | Tracking error < 3% |
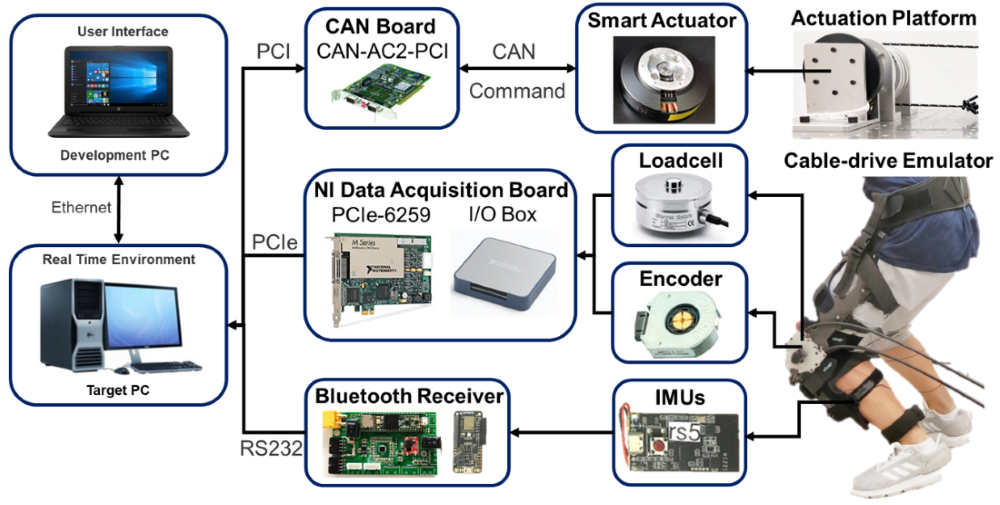
Tethered Exoskeleton Architecture
Video
Publication
Yu S, Huang TH, Wang D, Lynn B, Sayd D, Silivanov V, Park YS, Tian Y, Su H. Design and Control of a High-Torque and Highly-Backdrivable Hybrid Soft Exoskeleton for Knee Injury Prevention during Squatting . IEEE Robotics and Automation Letters (RA-L), 2019.
![]() PDF
| Video
PDF
| Video
Comparison
Tethered System

Portable System
