Portable Shoulder Exosuit
We created the most lightweight, portable, powered upper limb exoskeleton that provides high torque assistance and is suitable for heterogeneous users with different levels of impairments.

Hardware Features
Our shoulder exoskeleton assists 2 DoF movements (flexion/extension, abduction/adduction) while most robots are either passive or only provide 1 DOF assistance. Thanks to the high torque density motor and compact electronics design, our shoulder exoskeleton is fully portable and modular and can be used for bilateral or unilateral assistance (e.g., stroke is hemiparesis and requires unilateral assistance).

 Datasheet
Datasheet
General Specifications
| Property | Value |
|---|---|
| Total Mass | 3.3kg |
| Portability | Fully Portable |
| Voltage | 24 V |
| Rated Assistive Torque | 9 Nm |
| Peak Output Torque | 27 Nm |
| Range of Motion | 0 - 140° |
| Battery Life | 2 hours |
| Controller Communications | Bluetooth |
Motor Specifications
| Property | Value |
|---|---|
| Motor Used | Omni-80-6-Beta |
| Motor Size | Ø98 mm x 43 mm |
| Motor Nominal Voltage | 48 V |
| Motor Nominal Torque | 9 Nm |
| Motor Nominal Speed | 165 RPM |
| Motor Nominal Power | 240 W |
| Motor Max Stall Torque | 21 Nm |
| Motor Weight | 630 g |
| Motor Gear Ratio | 6:1 |
| Encoder | 16-bit magnetic encoder |
Actuator Specifications
| Property | Design | Ratio |
|---|---|---|
| Shoulder Torque | 12 Nm | 36 : 1 |
| Shoulder Motion | -30-170° | |
| Elbow Torque | 2 Nm | 6 :1 |
| Elbow Motion | 30-180° | |
| Wrist Torque | 0.33 Nm | 1 : 1 |
| Wrist Motion | -80-80° | |
| Angular Speed | > 15 rad/s | |
| Backdriving Torque | < 10 % | |
| Weight (5 actuators) | 1.2 Kg |
Control Specifications
| Control Loop | Torque/Speed/Position loop |
| Master Computer Communication | Bluetooth, USB (RS-232) |
| Microcontroller communication | RS232, CAN bus |
| Control Platform | Bluetooth |
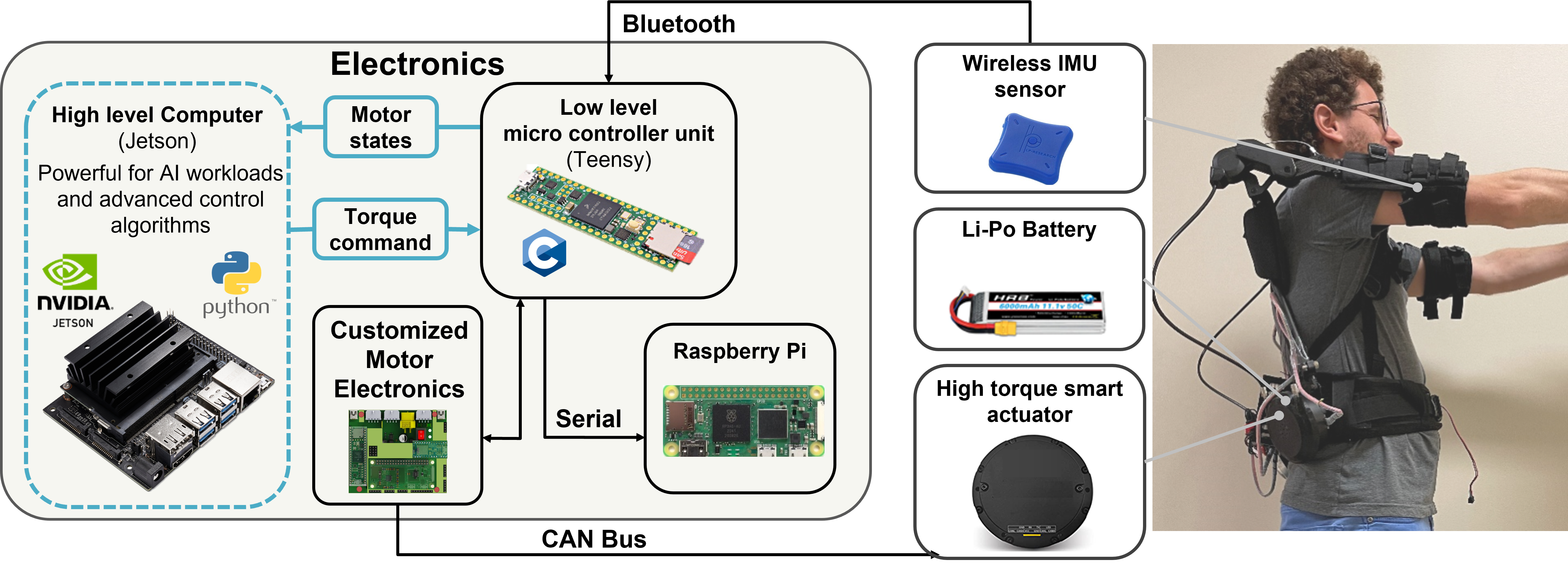
Shoulder Exoskeleton Control Architecture