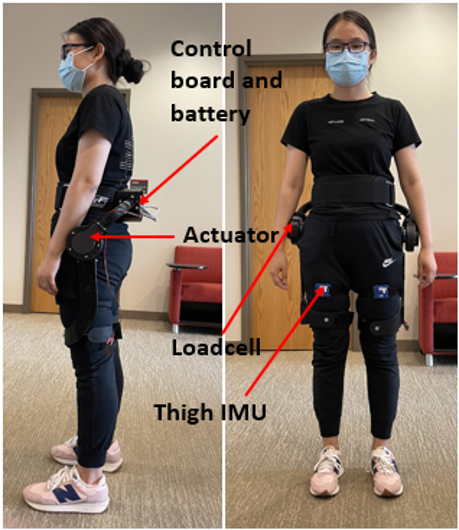
Portable Hip Exoskeleton
 Datasheet
Datasheet
Specifications
| Property | Value |
|---|---|
| Nominal Voltage | 24V |
| Motor Nominal Torque | 2 Nm |
| Motor Peak Torque | 6 Nm |
| Motor Nominal Speed | 1500 RPM |
| Gear ratio | 9:1 |
| Actuator Output Nominal Torque | 12 Nm |
| Actuator Output Peak Torque | 36 Nm |
| Actuator Output Speed | 188 RPM |
| Mass (without battery) | 2.6 kg |
| Mass (with battery) | 3.2 kg |
| Flexion/Extension Abduction/Adduction |
130°/40° 90°/60° |
| Actuation type | Fully Portable |
| Battery life | 1.5 hours |
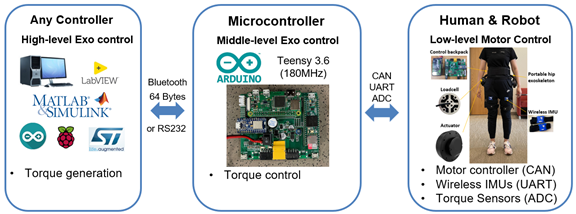
Architecture of Sensor, Communication, Control
The electronic architecture of the exoskeleton facilitated high-level torque control, motor control, sensor signal conditioning, data communication, and power management.
Video 2023 ICRA
Video 2020 Transactions on Mechatronics
Publication
Yu S, Huang TH, Yang X, Jiao C, Yang J, Chen Y, Yi J, Su H. "Quasi-Direct Drive Actuation for a Lightweight Hip Exoskeleton with High Backdrivability and High Bandwidth", IEEE/ASME Transactions on Mechatronics, vol. 25, no. 4, pp. 1794-1802, Aug. 2020, doi: 10.1109/TMECH.2020.2995134.
![]() PDF
| Video | Demo Video | Code
| Award
PDF
| Video | Demo Video | Code
| Award
I. Dominguez, S. Luo, R. Wu, H. Su, “Reinforcement Learning through Physics-based and Data-driven Approaches for
Exoskeleton Control in the Real World” 2023 IEEE International Conference on Robotics and Automation (ICRA), Workshop: Neuromechanics Meets Deep Learning,
London, UK.
![]() PDF |
Poster
PDF |
Poster